
Da künstliche Intelligenz und Robotiktechnologie immer weiter voranschreiten, werden Stereo-Tiefenkameras zunehmend als entscheidende Sensoren in verschiedenen Robotersystemen eingesetzt. Als unverzichtbares Wahrnehmungsgerät für Roboter liefern Stereo-Tiefenkameras hochpräzise Tiefeninformationen und ermöglichen es Robotern, Aufgaben wie Umgebungswahrnehmung, Stereovision, Haltungserkennung, intelligente Navigation, Mensch-Computer-Interaktion und Zielverfolgung auszuführen.
SGWRD Stereovision-Kameras der Falcon-Zx-Serie
Vor kurzem hat SGWRD sein technisches Fachwissen und seine Produkterfahrung im Bereich hochwertiger KI-Bildgebung genutzt, um die Falcon-Zx-Serie von Stereovisionskameras auf den Markt zu bringen, die speziell für Roboteranwendungen entwickelt wurden. Dieses Produkt besteht aus zwei IR-Bildsensoren, einem RGB-Bildsensor, einem Infrarot-Speckle-Projektor und einer IMU, die alle von einer USB 3.0-Schnittstelle in einer 3D-Stereokamera unterstützt werden.

Die Stereo-Vision-Kameras der SGWRD Falcon-Zx-Serie nutzen ein aktives Stereo-Vision-Prinzip, um Tiefeninformationen genauer zu erfassen. Diese Serie liefert nicht nur hochauflösende Bilddaten mit hoher Bildrate, sondern bietet auch eine hervorragende Bildleistung und liefert qualitativ hochwertige Bilder in verschiedenen Anwendungsszenarien. Dadurch wird sichergestellt, dass KI-Roboter in unterschiedlichen Umgebungen eine klare Sicht behalten.
Die Falcon-ZF-Stereovisionskamera der Falcon-Zx-Serie unterstützt sowohl die aktive Stereotechnologie für 3D-Bildgebung auf Basis von strukturiertem Licht als auch die passive Stereotechnologie auf Basis von sichtbarem Licht. Es kann eine Tiefenmessung über einen Bereich von bis zu 25 Metern erreichen und hilft Robotern dabei, ihre Umgebung in komplexen und dynamischen Umgebungen zuverlässig wahrzunehmen.
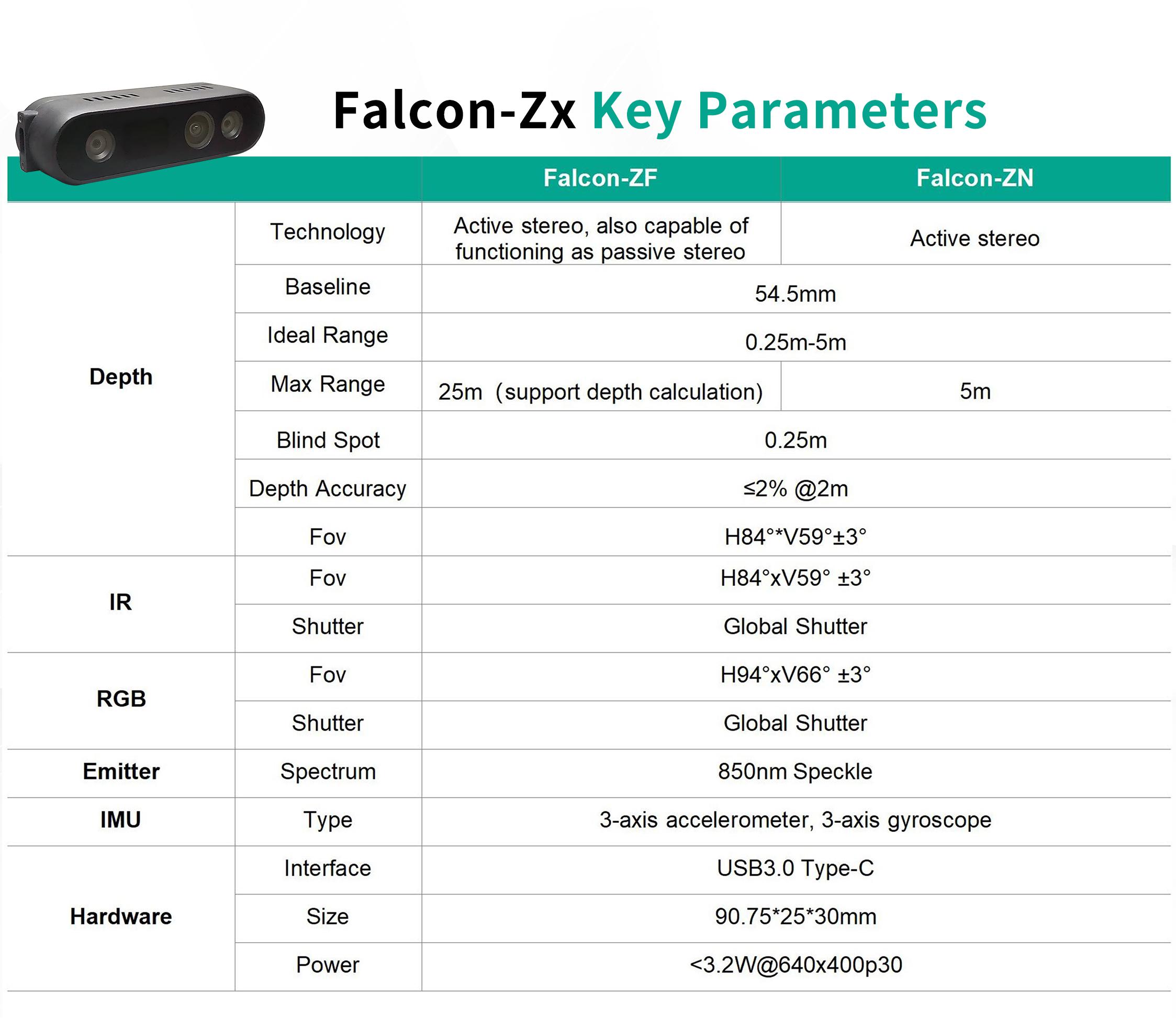
Die Stereokameras der SGWRD Falcon-Zx-Serie können Bilddaten mit einer maximalen Auflösung von 1280 x 800 bei 30 Bildern pro Sekunde ausgeben. Die IR- und RGB-Bildsensoren nutzen die Global-Shutter-Technologie, um Bewegungsartefakte zu minimieren und so eine hochwertige Wahrnehmungsleistung auch in Umgebungen mit hoher Bewegungsgeschwindigkeit zu gewährleisten. Darüber hinaus integriert die Stereokamera eine 6-Achsen-IMU und versorgt Roboter mit hochpräzisen 3D-Positionierungsdaten für verschiedene Anwendungsszenarien.
 â² SGWRD Bildeffekte für Stereokameras der Falcon-Zx-Serie
â² SGWRD Bildeffekte für Stereokameras der Falcon-Zx-Serie
Die Stereokameras der SGWRD Falcon-Zx-Serie kombinieren Stereosicht mit einer RGB-Kamera. Die RGB-Bilddaten bieten zusätzliche Unterstützung und Informationen für die Roboterwahrnehmung und Entscheidungsfindung und ermöglichen es Robotern, Merkmale wie Farbe und Form von Zielobjekten zu erfassen, um sie präziser zu identifizieren und zu greifen, und erfüllen so die Nachfrage nach flexibleren Roboteroperationen.

Was das Design angeht, zeichnen sich die Stereokameras der SGWRD Falcon-Zx-Serie durch ein kompaktes Design mit Abmessungen von 90,75 x 25 x 30 mm aus, wodurch sie äußerst anpassungsfähig und nahtlos in eher robotergestützte und räumliche Wahrnehmungsanwendungen integrierbar sind. Darüber hinaus sind diese Stereokameras vielseitig einsetzbar für AGV/AMR, Drohnen-Hindernisvermeidung, Navigation und andere ähnliche Anwendungen.
Falcon-Zx-Stereokameralösung basierend auf der NVIDIA-Plattform
Als NVIDIA-Partner hat SGWRD die Stereovisionskameras der Falcon-Zx-Serie mithilfe der Softwaretreibertechnologie auf Jetson AGX Orin umfassend in die Jetson AGX Orin-Plattform integriert. Diese Integration ermöglicht es Entwicklern, verschiedene Anwendungen effizienter zu erstellen sowie Lernen und Forschung durchzuführen.

Die Stereo-Vision-Kameras der Falcon-Zx-Serie können über eine USB 3.0-Schnittstelle mit der Jetson AGX Orin-Plattform verbunden werden und auf dem ROS-System betrieben werden. Aufbauend auf der Jetson AGX Orin-Entwicklungsplattform wird SGWRD außerdem ein Entwicklungskit für die Stereo-Vision-Kameras der Falcon-Serie auf den Markt bringen und umfassenden technischen Support und Dienstleistungen für Entwickler bieten, die hochpräzise 3D-Stereokameralösungen im Bereich Robotik-Vision benötigen Unterstützung des Einsatzes von Roboteranwendungen in mehr Szenarien.
SGWRD hat sich der Bereitstellung hochwertiger Bildgebungsprodukte und -lösungen für verschiedene komplexe KI-Anwendungen verschrieben.

 IPv6-Netzwerk wird unterstützt
IPv6-Netzwerk wird unterstützt
 Deutsch
Deutsch English
English Deutsch
Deutsch русский
русский español
español 日本語
日本語
